推 lll156k1529 : 探測能力特斯拉可以靠AI彌補? 06/18 21:13
→ DYE : 或許在非北美的區域的車款目前還沒安裝,覺得有需 06/18 21:14
→ DYE : 要的車主可能再等下。 06/18 21:14
→ stkoso : 總之特斯拉贏了 贏兩次 06/18 21:19
推 Barolo : 我一直都還是覺得雷達跟光達不太有互相取代的問題 06/18 21:30
→ Barolo : 雖然有很大一部份功能重疊 但仍各有互補的地方 06/18 21:31
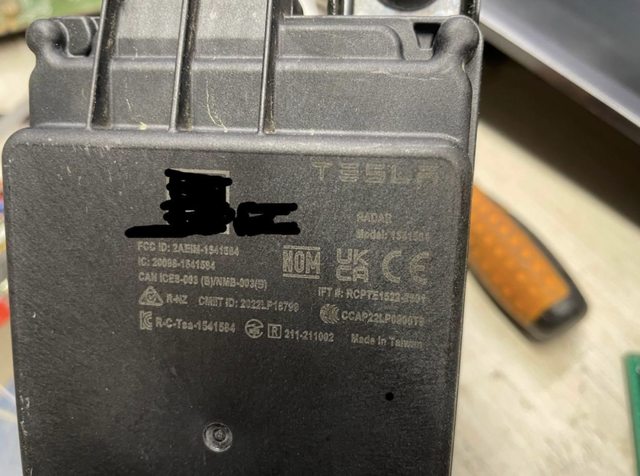
推 csct927 : 殼上面好像有NCC的認證了? 06/18 21:31
→ dslite : 台灣的都有裝 只是會不會啟用天曉得 06/18 21:33
推 StarburyX : 不是ARBE 不是4D 只是高清雷達而已 06/18 21:43
→ StarburyX : 可以看美西太太的影片 06/18 21:44
→ StarburyX : 只是剛剛好代號都叫鳳凰 06/18 21:44
→ DYE : 原來如此,因為印象中前幾天有特粉說HW4.0只有攝影 06/18 22:32
→ DYE : 機。翻回去看才清楚是針對M-Y只有攝影機。 06/18 22:32
→ DYE : 所以將來的FSD如果有上的話,有分三個段位。S/X的 06/18 22:34
→ DYE : ,3/Y的,HW3.0的。想安全點的就多花點。 06/18 22:35
→ dslite : Tesla: everything I do I do it for cost 06/18 22:36
推 ilovedirk41 : 業務說台灣今年不會進 HW4.0的Y是真的嗎 06/18 22:53
推 shin30 : 業務的嘴? 06/18 23:02
推 Windcws9Z : 光達 比 雷達 強 06/18 23:03
→ Windcws9Z : 雷達 比 光達 便宜 06/18 23:03
→ Windcws9Z : 本質不同的東西是要怎麼互相取代呢 06/18 23:03
→ Windcws9Z : 難不成你會說機車跟汽車都是交通工具 06/18 23:05
→ Windcws9Z : 所以便宜的機車可以取代汽車嗎 06/18 23:06
→ DYE : 這個嘛,因為光達的價格在降,而4D毫米波雷達的效 06/18 23:12
→ DYE : 能可能因為算法或是與其他感應器合用而提昇,也許 06/18 23:12
→ DYE : 以後會發生取代的事也說不定。反正事情別說太死。 06/18 23:12
→ DYE : 當然,如果特斯拉這不是4D雷達就不是,同樣也有可 06/18 23:13
→ DYE : 能因為與其他感應器協作而提昇效用。 06/18 23:13
推 Windcws9Z : 與其他感應器協作而提昇,那功勞就不全在雷達上 06/18 23:24
→ Windcws9Z : 更別說光達也能搭配協作 06/18 23:26
→ Windcws9Z : 據說有接近光達的能力? 06/18 23:28
→ Windcws9Z : 據說聽聽就好,接近光達能力 06/18 23:28
→ Windcws9Z : 50 → 60 有進步也算接近啊 06/18 23:28
→ DYE : 當然,就是看整體價格是不是還能比光達便宜。當然 06/18 23:29
→ DYE : 價格成本也不是全部考量,可能不同車廠有不同擅長 06/18 23:29
→ DYE : 的技術等等。 06/18 23:29
→ Windcws9Z : 成本應該是主要喇,不過還是要看車廠技術 06/18 23:32
→ Windcws9Z : 以及Sensor功能是否合用Lv幾的要求 06/18 23:32
→ Windcws9Z : 現在Lv2能用雷達降低成本,以後就不知道了 06/18 23:32
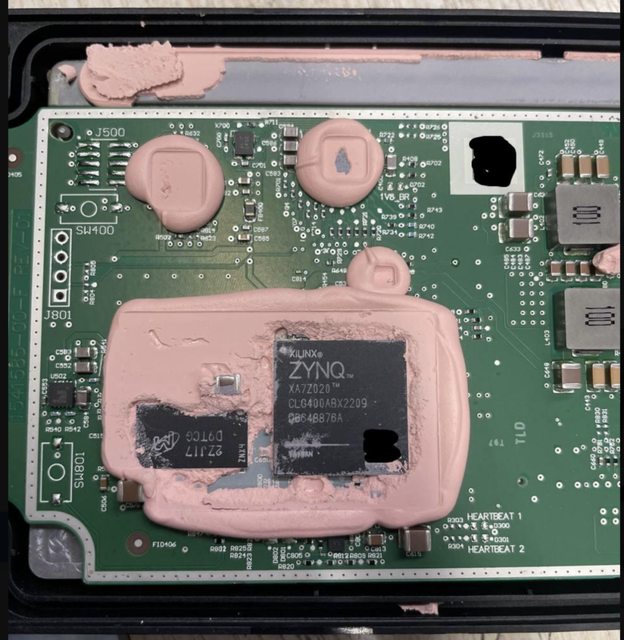
→ DYE : 然後,Xilinx FPGA Zynq7020是深度學習感知用的芯 06/18 23:33
→ DYE : 片,明顯比一般的高清雷達用的強大。特斯拉也不會 06/18 23:33
→ DYE : 白花錢。 06/18 23:33
→ Windcws9Z : 特斯拉也知道之前的硬體不夠用,不然也不會改 06/18 23:34
→ Windcws9Z : 電腦晶片 運算算法 感應器,環環相扣 缺一不可 06/18 23:37
推 Windcws9Z : 反正不管怎樣特斯拉就是又自打嘴巴了 06/18 23:41
→ Windcws9Z : HW3.0電腦能辦到的,就不可能換4.0 06/18 23:43
→ Windcws9Z : 一般雷達能辦到的,就不可能換4D雷達 06/18 23:44
→ Windcws9Z : 除非後者比前者更便宜,但我們都知道 那是不可能的 06/18 23:44
→ DYE : Zynq 大量用在光達與毫米波雷達,像Continental AR 06/19 00:04
→ DYE : S540 4D毫米波雷達就是用這個。 06/19 00:04
→ DYE : Continental ARS540 是最早量產的車用4D毫米波雷達 06/19 00:06
推 MKIU : 感謝白老鼠們 06/19 00:35
推 mibro : 比較好奇光達比雷達強這個結論怎麼得出來的XD 06/19 00:56
→ DYE : 這的雷達如果是說現在的4D毫米波雷達 06/19 01:13
→ DYE : 現在4D毫米波雷達大概距離在300-350米,成像每秒10 06/19 01:14
→ DYE : 萬個點。 06/19 01:14
→ DYE : 角分辨率大概在1度 06/19 01:16
→ DYE : 現在車用的光達,距離在500m,有些已經到1km。每秒 06/19 01:17
→ DYE : 140萬雲點(128線),角分辨率在0.1度。 06/19 01:18
→ DYE : 所以現在的4D毫米波雷達的性能,大概是8線的光達等 06/19 01:19
→ DYE : 級。 06/19 01:19
→ DYE : 所以在解析度上,4D毫米波雷達跟主流車用光達有一 06/19 01:23
→ DYE : 個數量級的差距,就是看得比較不清楚的意思。 06/19 01:24
推 Haker : Model Y的HW4.0應該是沒有搭載這顆雷達,只有S/X才 06/19 05:27
→ Haker : 有。這也是壓垮我選X的最後一根稻草 06/19 05:28
推 dream6789 : 推 06/19 07:05
推 timk7 : Y以後有沒有這雷達,我覺得可看3改款之後的狀況 06/19 10:31
推 alexfann : LiDAR 要到500m以上,power要超高,而且超容易被水 06/19 10:34
→ alexfann : 氣吸收。 06/19 10:34
→ alexfann : 另外,LiDAR 掃出來的資訊,還是需要配合camera協作 06/19 10:34
→ alexfann : 跟演算法來判斷,不然有一個像狗造型的紙箱,就讓汽 06/19 10:34
→ alexfann : 車急煞也太恐怖了。 06/19 10:35
→ alexfann : 但是攝影機要看到500m以上,困難度越來越高。 06/19 10:35
→ DYE : 現在沒有人單靠光達,只是一部分資訊來源且互為冗 06/19 10:43
→ DYE : 余。 06/19 10:43
→ chng8371 : 有空間有預算就都塞。手機就是什麼都塞 06/19 12:20
推 Killercat : 嚴格講起來車用的LiDAR不用開到500m啦,意義不大 06/19 14:37
→ Killercat : 頂多開個100 200m就已經很足夠了 500m代表15秒的距 06/19 14:40
→ Killercat : 離(120kph下),滿沒必要的,更不用講普通道路上 06/19 14:40
→ Killercat : 常常看不到那麼遠的就會被車擋住 06/19 14:40
→ Killercat : 5-8秒的距離應該就很夠了,雖然這數據沒科學計算 06/19 14:41
→ Killercat : 但是15秒真的很長噎 XD 06/19 14:41
推 ohlong : Sensor永遠大於系統的 sensor爛怎麼玩系統一樣爛 06/19 15:20
→ ohlong : 就單純costdown考量而已 06/19 15:20
推 Windcws9Z : 有些人的說法,就好比眼睛視力1.2沒必要 06/19 23:51
→ Windcws9Z : 有個0.5能看到前方那台車就夠了 06/19 23:51
推 Windcws9Z : 資料這種東西沒有人在嫌少的,搭配各感應器 鏡頭 06/19 23:59
→ Windcws9Z : 你甚至能演算各車輛會如何移動 06/19 23:59
→ Windcws9Z : 推算出前方交通狀況是否順暢 塞車 06/19 23:59
→ Windcws9Z : 進而避免因堵車而閃避不急造成追撞事故 06/19 23:59
→ Windcws9Z : 如果你的自駕需求,只是要咬住前方那台車 06/20 00:01
→ Windcws9Z : 那現在車輛的軟硬體足矣 06/20 00:01
推 darktasi : 教主失蹤了 06/20 17:45
推 bmw530li : 要打臉粉絲的純視覺了嗎??喔時空背景不同 06/20 22:46